a. Mengetahui Apa Itu Photodiode and Application
b. Mengetahui Rangkaian dari Photodiode and Application
c. Mengetahui Fungsi dari Photodiode and Application
d. Membuat Robot Line Follower
b. Memahami Prinsip Kerja Robot Line Follower
2. Alat dan Bahan
a. Resistor
b. Photodioda
c. LM324
d. LED
e. Potensio / Resistor Variabel
f. L293D
g. Motor DC
3. Teori
Robot Line Follower (LF) merupakan robot yang dapat mengikuti garis, biasanya garis hitam dengan background putih. Terdapat duq jenis robot Line Folower yaitu
LF analog dan LF digital. Perbedaannya yaitu pada LF analog tidak
menggunakan mikrokontroler untuk pengendaliaanya, sedankan LF digital
menggunakan mikrokontroler sebagai pengendaliannya. Nah untuk sekarang
saya akan membahas mengenai Robot Line Follower Analog dengan
menggunakan Fotodioda sebagai sensor dan LM24 sebagai IC komparator. Untuk lebih jelasnya baca penjelasan berikut ini.
A. Prinsip Kerja Photodioda
Sensor
yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya
akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse
bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini
mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai
cahaya ke photo dioda.

Gambar 1. Photodiode

Gambar Rangkaian sensor
Cara kerjanya :
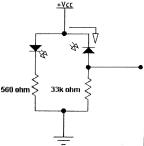
Gambar Sensor tidak terkena cahaya
Jika
photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar
atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada
komparator sangat kecil atau dapat diasumsikan dengan logika 0.

Gambar Sensor terkena cahaya
Jika
photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai
sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga
akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator
pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi
rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana
input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa
high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat
bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal
mulai tegangan 6 volt.
Dalam
rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator.
Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor
(VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan
unduh disini.

Gambar 2. IC LM 324
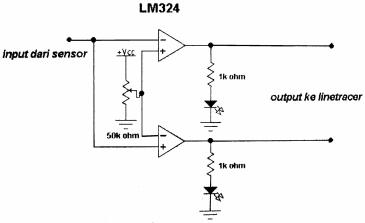
Gambar Rangkaian komparator
►
Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian
ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya
pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on,
sedangkan pada IC 2 sebaliknya LED-B off.
►
Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka
tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2
tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC
1 sebaliknya maka LED-A off.
Kondisi antara titik A dan B akan selalu keterbalikan.
C. Prinsip Kerja Driver Motor
Driver
adalah rangkaian yang tersusun dari transistor yang digunakan untuk
menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang
dipasang sesuai karakteristiknya.

Gambar 3. Motor Driver
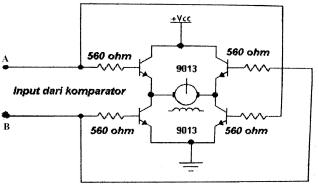
Gambar Rangkaian driver H-Bridge Transistor


Gambar Rangkaian dalam driver motor L293D
Pada
saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian,
akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor
berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika
0, jadi transistor 2 dan 3 akan off.
D. Prinsip Kerja Transistor
Pengertian Transistor dan Jenis-jenis Transistor – Transistor adalah komponen semikonduktor yang memiliki berbagai macam fungsi seperti sebagai penguat, pengendali, penyearah, osilator, modulator dan lain sebagainya. Transistor merupakan salah satu komponen semikonduktor yang paling banyak ditemukan dalam rangkaian-rangkaian elektronika. Boleh dikatakan bahwa hampir semua perangkat elektronik menggunakan Transistor untuk berbagai kebutuhan dalam rangkaiannya. Perangkat-perangkat elektronik yang dimaksud tersebut seperti Televisi, Komputer, Ponsel, Audio Amplifier, Audio Player, Video Player, konsol Game, Power Supply dan lain-lainnya.

Gambar 4. Transistor
Jenis-jenis Transistor

Gambar Jenis-jenis Transistor
Transistor Bipolar adalah Transistor yang struktur dan prinsip kerjanya memerlukan perpindahan muatan pembawanya yaitu electron di kutup negatif untuk mengisi kekurangan electon atau hole di kutub positif. Bipolar berasal dari kata “bi” yang artinya adalah “dua” dan kata “polar” yang artinya adalah “kutub”. Transistor Bipolar juga sering disebut juga dengan singkatan BJT yang kepanjangannya adalah Bipolar Junction Transistor.
Jenis-jenis Transistor Bipolar
- Transistor Bipolar terdiri dari dua jenis yaitu Transistor NPN dan Transistor PNP. Tiga Terminal Transistor ini diantaranya adalah terminal Basis, Kolektor dan Emitor Transistor NPN adalah transistor bipolar yang menggunakan arus listrik kecil dan tegangan positif pada terminal Basis untuk mengendalikan aliran arus dan tegangan yang lebih besar dari Kolektor ke Emitor.
- Transistor PNP adalah transistor bipolar yang menggunakan arus listrik kecil dan tegangan negatif pada terminal Basis untuk mengendalikan aliran arus dan tegangan yang lebih besar dari Emitor ke Kolektor.
Simbol Transistor Bipolar (BJT) dapat dilihat di gambar atas.
2. Transistor Efek Medan (Field Effect Transistor)
Transistor Efek Medan atau Field Effect Transistor yang disingkat menjadi FET ini adalah jenis Transistor yang menggunakan listrik untuk mengendalikan konduktifitasnya. Yang dimaksud dengan Medan listrik disini adalah Tegangan listrik yang diberikan pada terminal Gate (G) untuk mengendalikan aliran arus dan tegangan pada terminal Drain (D) ke terminal Source (S). Transistor Efek Medan (FET) ini sering juga disebut sebagai Transistor Unipolar karena pengoperasiannya hanya tergantung pada salah satu muatan pembawa saja, apakah muatan pembawa tersebut merupakan Electron maupun Hole.
Jenis-jenis Transistor Efek Medan (Field Effect Transistor)
Transistor jenis FET ini terdiri dari tiga jenis yaitu Junction Field Effect Transistor (JFET), Metal Oxide Semikonductor Field Effect Transistor (MOSFET) dan Uni Junction Transistor (UJT).
- JFET (Junction Field Effect Transistor) adalah Transistor Efek Medanyang menggunakan persimpangan (junction) p-n bias terbalik sebagai isolator antara Gerbang (Gate) dan Kanalnya. JFET terdiri dari dua jenis yaitu JFET Kanal P (p-channel) dan JFET Kanal N (n-channel). JFET terdiri dari tiga kaki terminal yang masing-masing terminal tersebut diberi nama Gate (G), Drain (D) dan Source (S).
- MOSFET (Metal Oxide Semiconductor Field Effect Transistor) adalah Transistor Efek Medan yang menggunakan Isolator (biasanya menggunakan Silicon Dioksida atau SiO2) diantara Gerbang (Gate) dan Kanalnya. MOSFET ini juga terdiri dua jenis konfigurasi yaitu MOSFET Depletion dan MOSFET Enhancement yang masing-masing jenis MOSFET ini juga terbagi menjadi MOSFET Kanal-P (P-channel) dan MOSFET Kanal-N (N-channel). MOSFET terdiri dari tiga kaki terminal yaitu Gate (G), Drain (D) dan Source (S).
- UJT (Uni Junction Transistor) adalah jenis Transistor yang digolongkan sebagai Field Effect Transistor (FET) karena pengoperasiannya juga menggunakan medan listrik atau tegangan sebagai pengendalinya. Berbeda dengan jenis FET lainnya, UJT mememiliki dua terminal Basis (B1 dan B2) dan 1 terminal Emitor. UJT digunakan khusus sebagai pengendali (switch) dan tidak dapat dipergunakan sebagai penguat seperti jenis transistor lainnya.

Prinsip Kerja Rangkaian :
Ketika
Photodioda menenerima cahaya maka arus akan mengalir menuju ground,
sehingga tegangan dari photodioda untuk kaki op-amp lebih kecil dari
tegangan referensi yang dihubungkan kekaki lainya pada op-amp. Pada
LM324 U2:A dan U2:C output tegangan referensi dihubungkan kekaki "+"
sehingga output yang dihasilkan berlogika "1" yang ditandai dengan
hidupnya LED Green, kemudian output dari LM324 U2:A diteruskan ke kaki
IN1 L293D dan output dari LM324 U2:C diteruskan ke kaki IN3 L293D.
Sedangkan pada LM324 U2:B dan U2:D output tegangan referensi dihubungkan ke kaki "-" sehingga output yang dihasilkan berlogika "0", output dari LM324 U2:B diteruskan ke kaki IN2 L293D dan output dari LM324 U2:D diteruskan kekaki IN4 L293D. Dengan demikian arah putaran motor searah jarum jam sehingga robot line follower melaju lurus.
Jika Photodioda tidak menenerima cahaya maka arus akan mengalir menuju kaki LM324, sehingga tegangan dari photodioda lebih besar dari tegangan referensi. Pada LM324 U2:A dan U2:C output tegangan fotodioda dihubungkan kekaki "-" sehingga output yang dihasilkan berlogika "0", kemudian output dari LM324 U2:A diteruskan ke kaki IN1 L293D dan output dari LM324 U2:C diteruskan ke kaki IN3 L293D.
Sedangkan pada LM324 U2:B dan U2:D output tegangan fotodioda dihubungkan ke kaki "+" sehingga output yang dihasilkan berlogika "1" ditandai dengan hidupnya LED merah, output dari LM324 U2:B diteruskan ke kaki IN2 L293D dan output dari LM324 U2:D diteruskan kekaki IN4 L293D. Dengan demikian arah putaran motor berlawanan arah jarum jam sehingga robot line follower bergerak mundur.
Perhatikan tabel mobilisasi robot linefollower berikut:

5.Video
Sedangkan pada LM324 U2:B dan U2:D output tegangan referensi dihubungkan ke kaki "-" sehingga output yang dihasilkan berlogika "0", output dari LM324 U2:B diteruskan ke kaki IN2 L293D dan output dari LM324 U2:D diteruskan kekaki IN4 L293D. Dengan demikian arah putaran motor searah jarum jam sehingga robot line follower melaju lurus.
Jika Photodioda tidak menenerima cahaya maka arus akan mengalir menuju kaki LM324, sehingga tegangan dari photodioda lebih besar dari tegangan referensi. Pada LM324 U2:A dan U2:C output tegangan fotodioda dihubungkan kekaki "-" sehingga output yang dihasilkan berlogika "0", kemudian output dari LM324 U2:A diteruskan ke kaki IN1 L293D dan output dari LM324 U2:C diteruskan ke kaki IN3 L293D.
Sedangkan pada LM324 U2:B dan U2:D output tegangan fotodioda dihubungkan ke kaki "+" sehingga output yang dihasilkan berlogika "1" ditandai dengan hidupnya LED merah, output dari LM324 U2:B diteruskan ke kaki IN2 L293D dan output dari LM324 U2:D diteruskan kekaki IN4 L293D. Dengan demikian arah putaran motor berlawanan arah jarum jam sehingga robot line follower bergerak mundur.
Perhatikan tabel mobilisasi robot linefollower berikut:

6.1 Skema Rangkaian disini
6.2 Video Rangkaian disini
6.3 Datasheet disini
Tidak ada komentar:
Posting Komentar